Training · RAISE 2026 · Second Edition
Agentic Robotics & VLA Models
for Autonomous Agriculture
"From Diagnosis to Action — Robots that See, Think, and Intervene."

"From Diagnosis to Action — Robots that See, Think, and Intervene."
I design and deliver hands-on AI & robotics training. This page presents RAISE 2026, the flagship summer-school bootcamp I serve as Technical Program Chair, where participants build a full agentic robotics pipeline in simulation — on a regular laptop, no GPU required locally.
RAISE 2025 ended at diagnosis — robots could detect a sick plant. RAISE 2026 closes the loop: robots that decide what to do and physically act on the field, powered by two of the strongest 2026 AI trends.
| Dimension | 2025 | 2026 |
|---|---|---|
| AI focus | VLM as perception (diagnosis) | VLM as planner + VLA as executor |
| Robot | Mobile base + camera | Mobile base + 6-DoF arm + RGB-D + gripper |
| Mission | Scout & report | Scout, diagnose, intervene, report |
| Compute | Local Jetson Nano | Laptop + cloud APIs + shared GPU server |
| Hands-on platform | Physical robot only | Shared simulation (Gazebo) + optional hardware |
| Assessment | Multiple-choice quizzes | Auto-graded code exercises + live hackathon |
Every student receives a single Docker image — raise2026-sim — that runs on a regular laptop. No GPU required locally; all heavy AI inference is offloaded to cloud APIs and a sponsored GPU server.
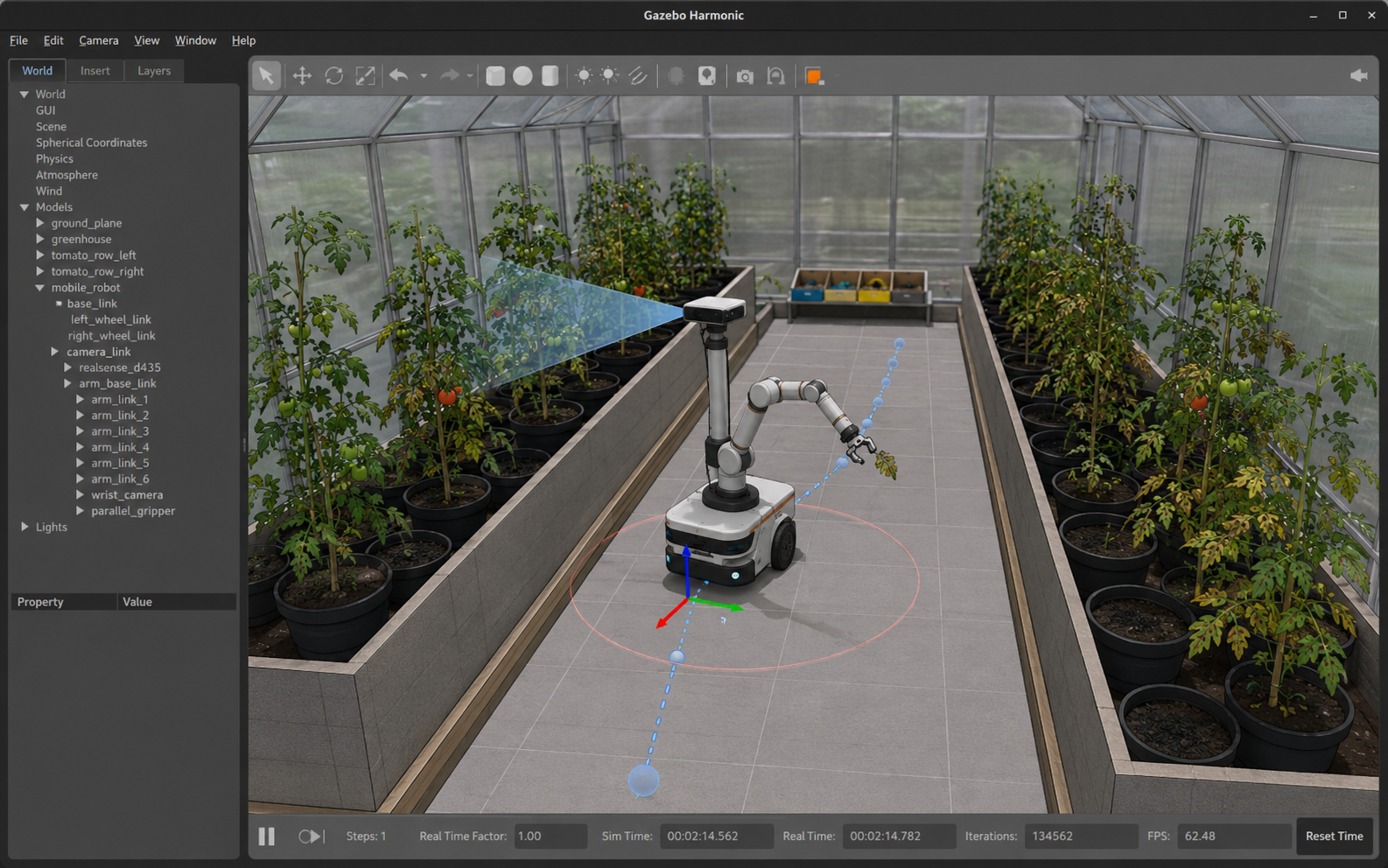
raise2026-sim environment students launch with one Docker command: RAISE-Bot with mast camera + 6-DoF arm, navigation waypoints, RGB-D frustum, and the sample tray.Gazebo Harmonic + ROS 2 Jazzy
Open-source, cross-platform, mature plugin ecosystem. Runs on Linux/macOS/Windows via Docker.
RAISE Greenhouse 2026
6×4 m greenhouse, parametric plants with programmable disease states (healthy / blight / nutrient deficiency), sample trays.
RAISE-Bot 2026
Differential mobile base + 6-DoF arm (SO-100 URDF) + mast RGB-D + wrist camera. Topics match the physical robot.

raise2026-sim/
├── docker/Dockerfile # ROS 2 Jazzy + Gazebo Harmonic
├── docker-compose.yml # one-command launch
├── worlds/greenhouse_2026.sdf
├── robot/raise_bot.urdf.xacro
├── exercises/ # 6 hands-on labs, each with starter + evaluator
├── api_clients/ # llm_client / vlm_client / vla_client
└── evaluator/ # AssessX-integrated auto-graderEvery lab follows the same template — a starter.py with clear TODO blocks, an evaluator.py that runs scripted scenarios in the sim, and pass/fail scoring fed into AssessX for tiered certification.
| Time | Block |
|---|---|
| 09:00 – 09:30 | Opening / recap |
| 09:30 – 10:45 | Lecture 1 — theory |
| 10:45 – 11:00 | Coffee break |
| 11:00 – 12:30 | Lecture 2 — theory + live demo |
| 12:30 – 14:00 | Prayer + Lunch |
| 14:00 – 15:45 | Lab 1 — hands-on in sim |
| 15:45 – 16:00 | Coffee break |
| 16:00 – 17:30 | Lab 2 — hands-on in sim |
| 17:30 – 18:00 | Quiz / debrief (AssessX) |
Mornings = theory (fresh minds). Afternoons = building (collaborative energy).
day1_01_ros2_tools_as_functionsWrap 4 ROS 2 capabilities (move_to, capture_image, get_robot_pose, report) as Python functions with tool schemas. Evaluator validates topic publishing and return shapes. Deliverable: tools.py.
day1_02_agentic_inspectorBuild an agent loop that takes a mission prompt, calls Claude/GPT with the tool schemas, executes returned tool calls, feeds observations back. Scored on F1 over 3 scenarios (normal, unreachable plant, occluded camera).
10 MCQs on tool-calling, MCP, agent failure modes.
POST /vla/actday2_01_teleoperation_and_dataTeleoperate the sim arm with keyboard / joystick. Record 30 demonstrations of "pick & place". Save as LeRobot episodes; upload to the RAISE shared server.
day2_02_vla_executorImplement vla_execute(instruction) — captures wrist camera, calls the hosted VLA, streams actions to the arm. Advanced track: fine-tune SmolVLA on the morning's dataset on the shared GPU.
10 MCQs on VLA architectures, imitation learning, latency.
day3_01_full_stackWalk-through of the LangGraph skeleton:
inspect → diagnose → IF diseased → plan_intervention
→ vla_execute → verify → report"In 3 hours, your robot must inspect 12 plants, pick one diseased leaf per sick plant, place each in the labeled tray, and submit a markdown field report. Three runs allowed; best counts."
Live leaderboard via the auto-evaluator. Submission: GitHub repo + 2-min demo video + report. Surprise scenario injected during judging (e.g. unreachable plant).
Rubric: success 40% / report 20% / code 20% / robustness 10% / creativity 10%. Bronze / Silver / Gold certification. Sponsor thanks & RAISE 2027 teaser.
Same simulation, same hackathon — different depth. BSc students and PhD researchers each leave with something useful.
| Lesson | Beginner Track | Advanced Track |
|---|---|---|
| Day 1 Lab 1.2 | One LLM, simpler tool set | Compare Claude / GPT / Llama, build a custom MCP server |
| Day 2 Lab 2.2 | Zero-shot VLA only | Fine-tune SmolVLA on the shared GPU; benchmark vs zero-shot |
| Day 3 Hackathon | Provided LangGraph skeleton | Free architecture; retrieval, memory, custom tools allowed |
EE, CS, Mechatronics. Required: Python basics, linear algebra. Helpful: prior ROS exposure.
Working on robotics, agritech, or applied AI. Advanced track recommended.
C++/Python and Linux fluency. Beginner track for AI newcomers; advanced for those with ML experience.
Pre-school week (T-7 days): async MOOC release — Docker setup, ROS 2 Jazzy primer, Python API client patterns. No on-site time wasted on environments.
| Phase | Window | Deliverable |
|---|---|---|
| P0 — Foundation | Now → Mar 2026 | Dockerized sim, RAISE-Bot URDF, hello-world greenhouse |
| P1 — World & robot | Mar → Apr 2026 | Final greenhouse, arm + gripper, RGB-D streaming |
| P2 — APIs & GPU server | Apr → May 2026 | LLM/VLM/VLA clients, GPU server live with rate limits |
| P3 — Exercises | May → June 2026 | All 6 labs written, tested, AssessX-graded |
| P4 — Beta with TAs | June 2026 | End-to-end dry run with 3–5 TAs; bug fixes |
| P5 — Pre-school MOOC | 1–7 July 2026 | Docker image + first 2 labs released to registrants |
| RAISE 2026 | 14–16 July 2026 | Live event |
RAISE 2026 — Robotics & AI Summer School, ENET'Com–Sfax (14–16 July 2026). General Chair: Prof. Omar Cheikhrouhou · Technical Program Chair: Prof. Anis Koubaa. Built on the legacy of RAISE 2025.